Entwodiksyon
Depi fen ane 1960 yo ak kòmansman ane 1970 yo, pifò sistèm tradisyonèl fotografi ayeryen yo te ranplase pa sistèm detèktè ayeryen ak ayewospasyal elektwo-optik ak elektwonik. Pandan ke tradisyonèl fotografi ayeryen travay prensipalman nan longèdonn limyè vizib la, sistèm modèn ayeryèn ak sistèm teledeteksyon ki baze sou tè pwodui done dijital ki kouvri limyè vizib, enfrawouj reflete, enfrawouj tèmik, ak mikwo ond rejyon espèk. Metòd tradisyonèl entèpretasyon vizyèl nan fotografi ayeryen yo toujou itil. Toujou, teledeteksyon kouvri yon seri pi laj nan aplikasyon, ki gen ladan aktivite adisyonèl tankou modèl teyorik nan pwopriyete sib, mezi espèk nan objè, ak analiz imaj dijital pou fè ekstraksyon enfòmasyon.
Deteksyon Remote, ki refere a tout aspè nan teknik deteksyon ki pa gen kontak, se yon metòd ki itilize elektwomayetik pou detekte, anrejistre ak mezire karakteristik yon sib epi definisyon an te premye pwopoze nan ane 1950 yo. Jaden an nan deteksyon aleka ak kat, li divize an 2 mòd deteksyon: aktif ak pasif deteksyon, nan ki Lidar deteksyon aktif, kapab sèvi ak pwòp enèji li yo emèt limyè nan sib la ak detekte limyè a reflete nan li.
Aktif Lidar Deteksyon ak Aplikasyon
Lidar (deteksyon limyè ak ranje) se yon teknoloji ki mezire distans ki baze sou tan an nan emèt ak resevwa siyal lazè. Pafwa Airborne LiDAR aplike interchangeable ak optik lazè ayeryèn, kat, oswa LiDAR.
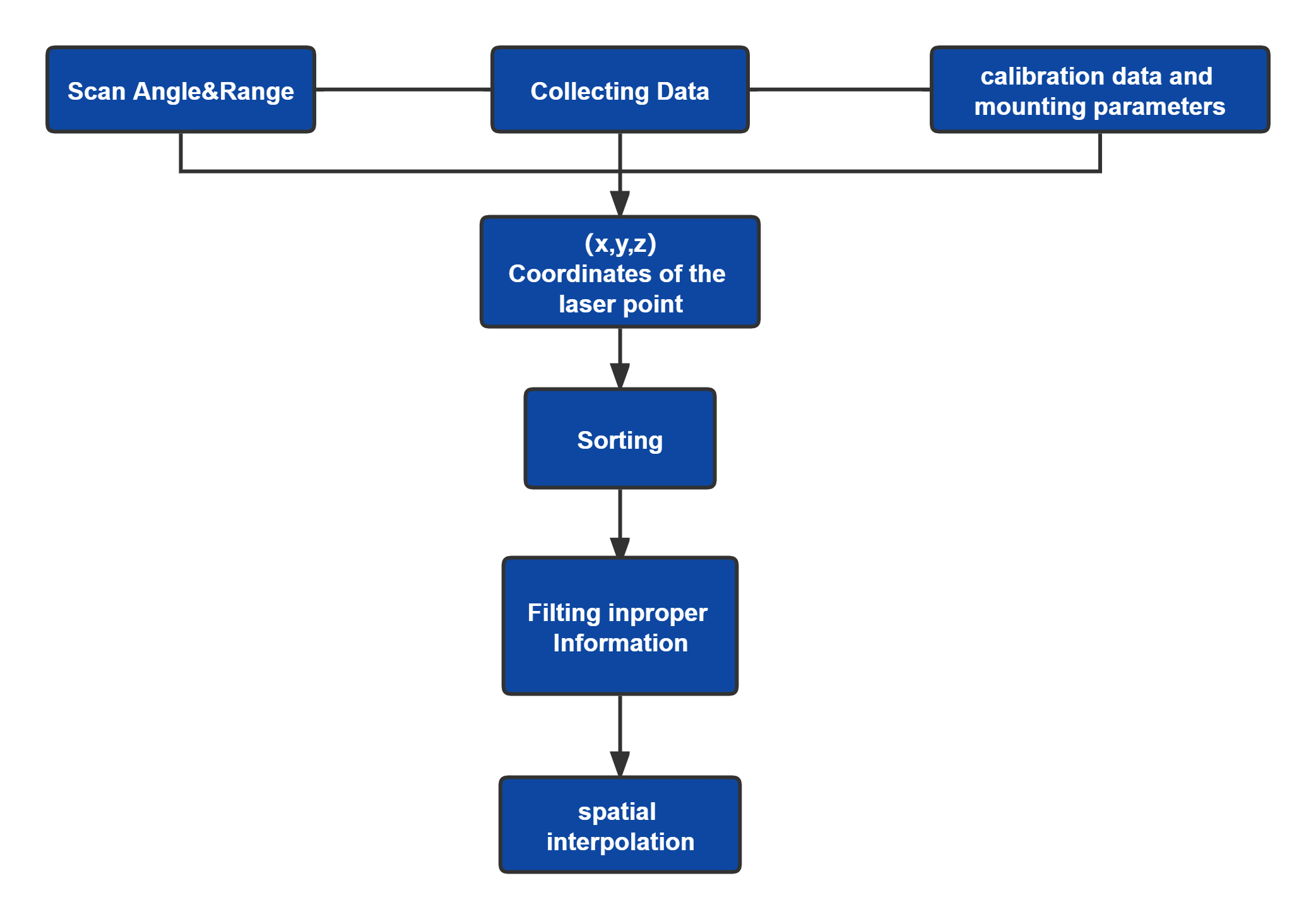
Sa a se yon organigram tipik ki montre etap prensipal yo nan pwosesis done pwen pandan itilizasyon LiDAR. Apre kolekte kowòdone (x, y, z) yo, klasman pwen sa yo ka amelyore efikasite nan rann done ak pwosesis. Anplis pwosesis jeyometrik pwen LiDAR, enfòmasyon entansite ki soti nan fidbak LiDAR itil tou.
Nan tout aplikasyon teledeteksyon ak kat, LiDAR gen avantaj diferan pou jwenn mezi pi egzak endepandan de limyè solèy la ak lòt efè move tan. Yon sistèm deteksyon tipik aleka konsiste de de pati, yon telemèt lazè ak yon Capteur mezi pou pwezante, ki ka dirèkteman mezire anviwònman jeyografik la nan 3D san yo pa distòsyon jewometrik paske pa gen okenn D ki enplike (mond 3D a imaje nan plan an 2D).
KÈK NAN SOUS LIDAR NOU
Je-san danje LiDAR Lazè Sous Chwa pou Capteur


